Projects
Smart Irrigation System - "Plant Doctor"
ECE 167 | February 2026 - March 2026
Plant Doctor is an embedded plant-monitoring and irrigation system built on the STM32 platform for ECE 167: Sensing and Sensor Technologies. The project combines capacitive soil moisture sensing, directional light sensing with a photodiode array, and automated irrigation through a PWM-controlled DC water pump to create a real-time “Plant Vitals” system. I worked primarily on the pump subsystem, designing both the transistor-based motor driver hardware and the embedded C motor-control module used for PWM power control and timed watering. The system continuously reads sensor data, calibrates and filters measurements, displays plant status on an LCD/OLED interface, and automatically waters the plant when soil conditions become too dry. This project gave me hands-on experience with embedded systems integration, ADC sensing, state-machine design, PWM motor control, hardware debugging, and combining mechanical, electrical, and software systems into a single functional product.
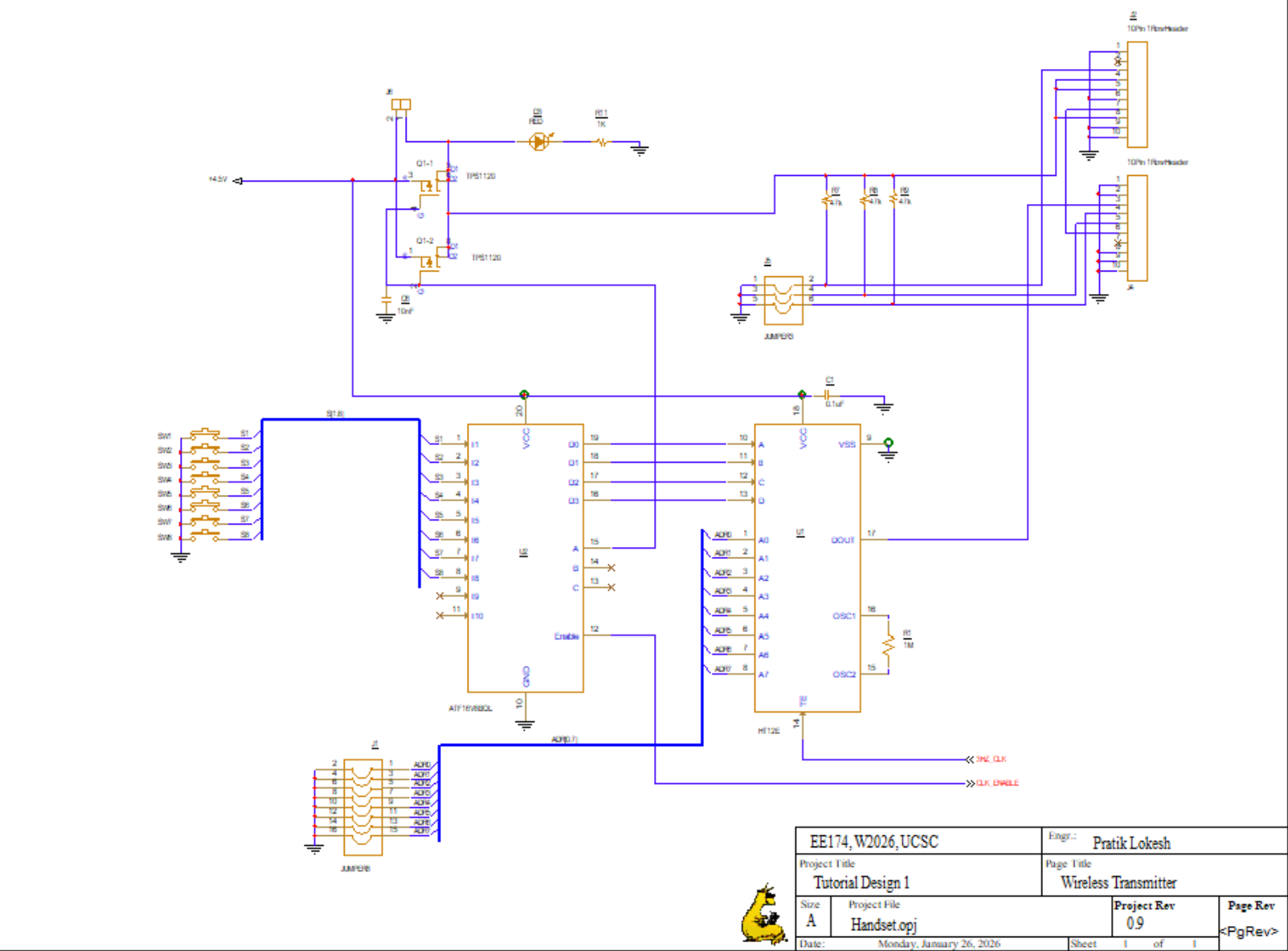
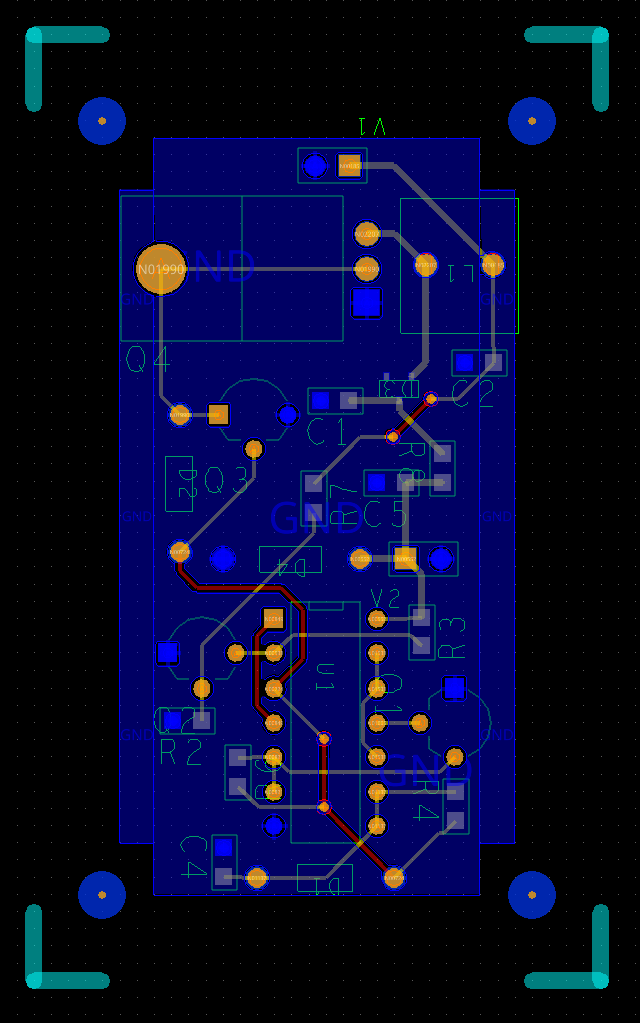
Cadence EDA
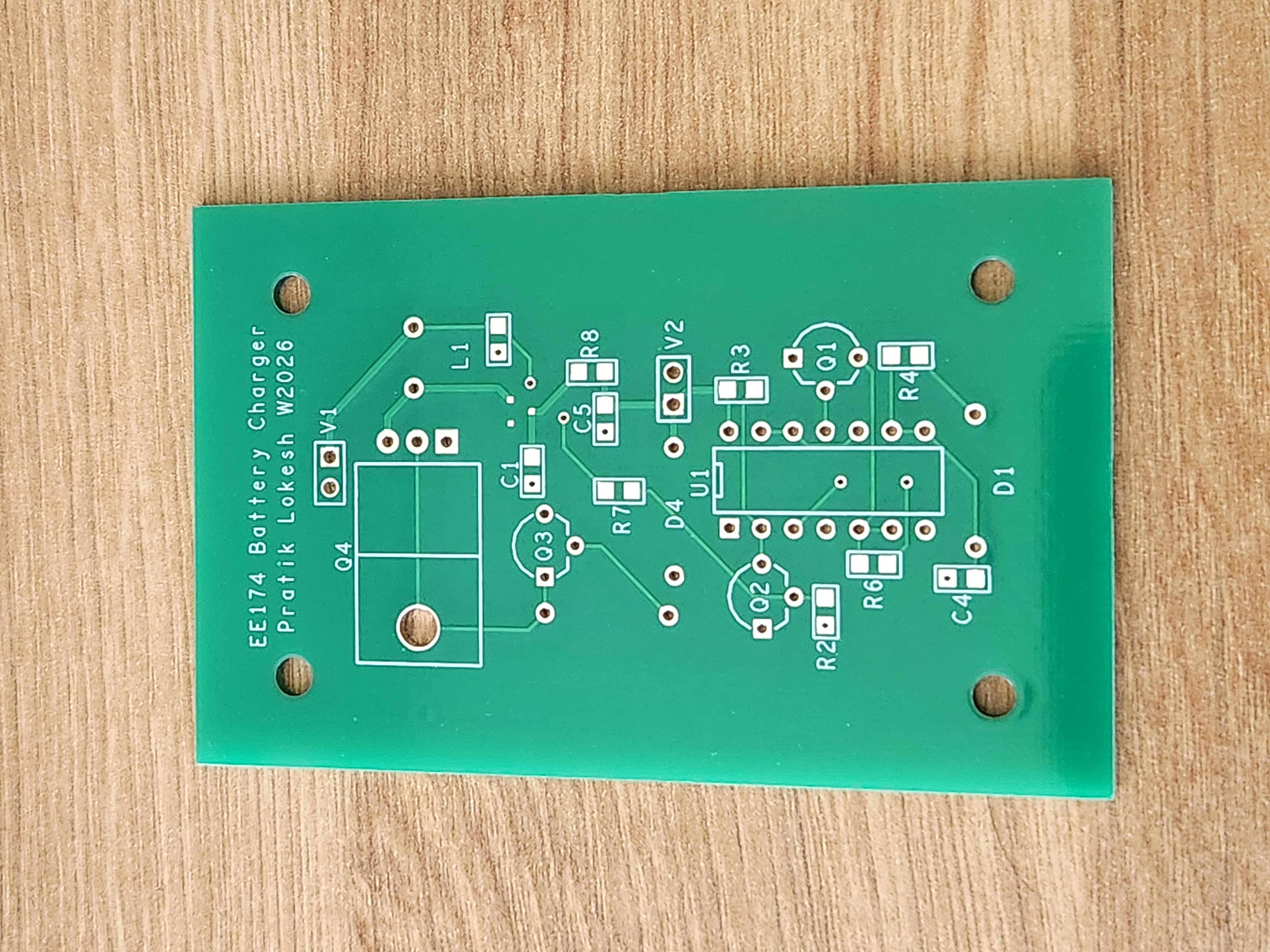
ECE 174 | January 2026 - Present
In ECE 174, I have been working extensively with Cadence tools to design, analyze, and verify analog and mixed-signal circuits. My work so far has involved schematic capture in Cadence Capture, circuit simulation and analysis, and iterative refinement based on performance metrics such as gain, bandwidth, stability, and operating point behavior. I have focused on translating theoretical circuit concepts into implementable designs, validating functionality through simulation, and debugging design issues at the schematic level. The course has emphasized disciplined circuit design methodology, attention to device-level behavior, and verification prior to layout, strengthening my practical skills in professional EDA workflows. As a culminating project, I independently designed and fabricated a single-board solar-powered battery charger featuring discrete analog power electronics, MOSFET-based switching circuitry, and custom PCB layout. This project strengthened my understanding of end-to-end hardware development, from circuit conception and simulation to PCB manufacturing and physical assembly.
Custom PID Control for Competitive FLL via Python
August 2025
Developed a custom Python PID control library for FIRST LEGO League robots using Pybricks, focused on improving motion consistency, accuracy, and overall system reliability. The project involved implementing and tuning PID control logic, structuring the library for modular reuse, and validating performance through iterative testing on real hardware. By abstracting complex control behavior into a robust, student-friendly interface, the library reduced variability in robot performance and allowed students to focus on strategy and engineering concepts rather than low-level debugging. This work emphasized control systems fundamentals, software reliability, and the importance of well-designed abstractions in supporting student success in competitive robotics environments.Photovoltaic Stop Sign System
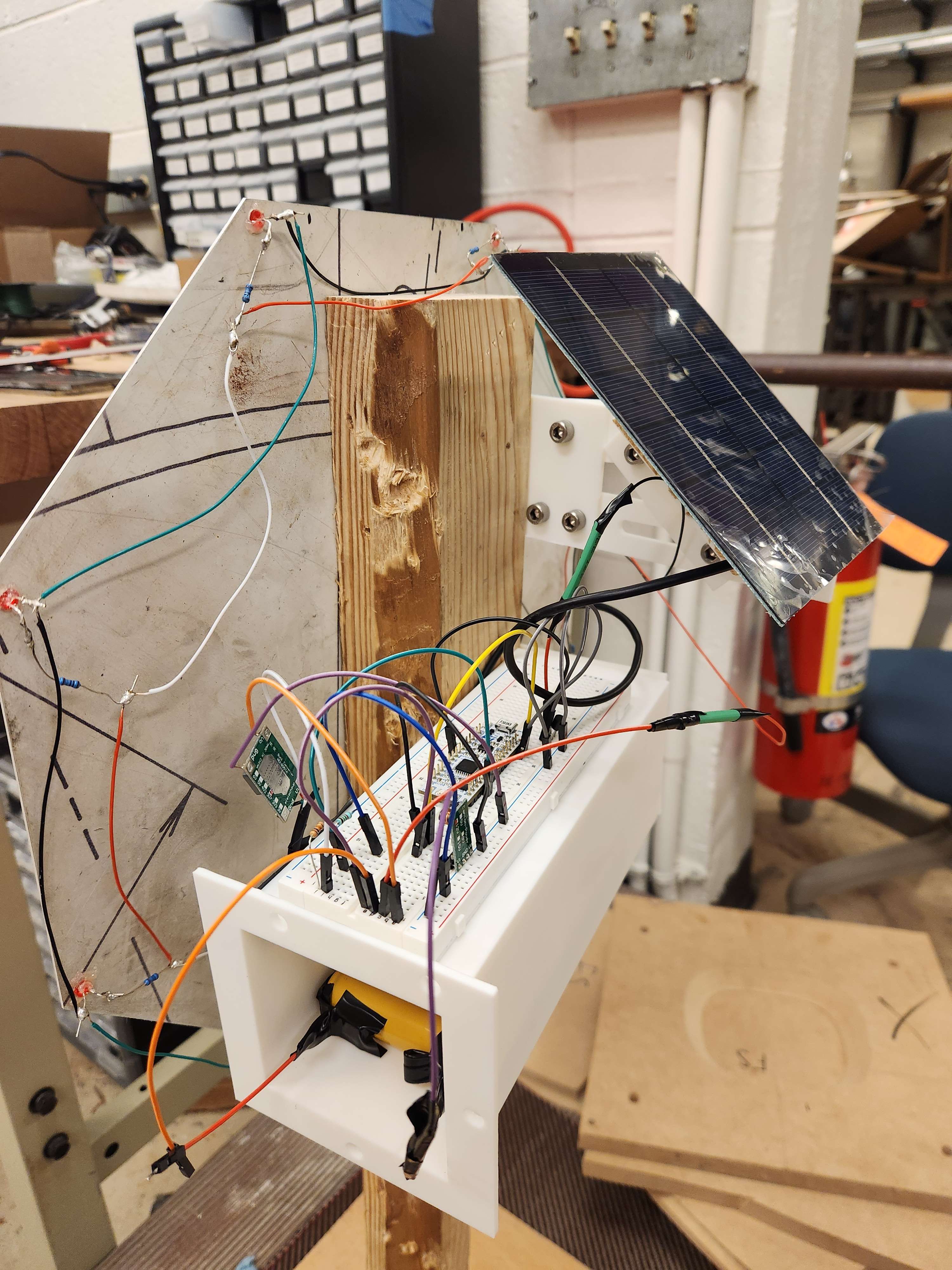
ECE 180J | March - June 2025
Designed and built a photovoltaic-powered stop sign illumination system to improve visibility during low-light conditions. Engineered a solar energy harvesting and storage solution, integrating photovoltaic panels, battery management, and power regulation to drive high-efficiency flashing LEDs. Focused on low-power design, reliability, and autonomous operation, ensuring consistent performance across varying lighting and environmental conditions. The project emphasized practical energy systems design, power electronics fundamentals, and real-world deployment constraints.
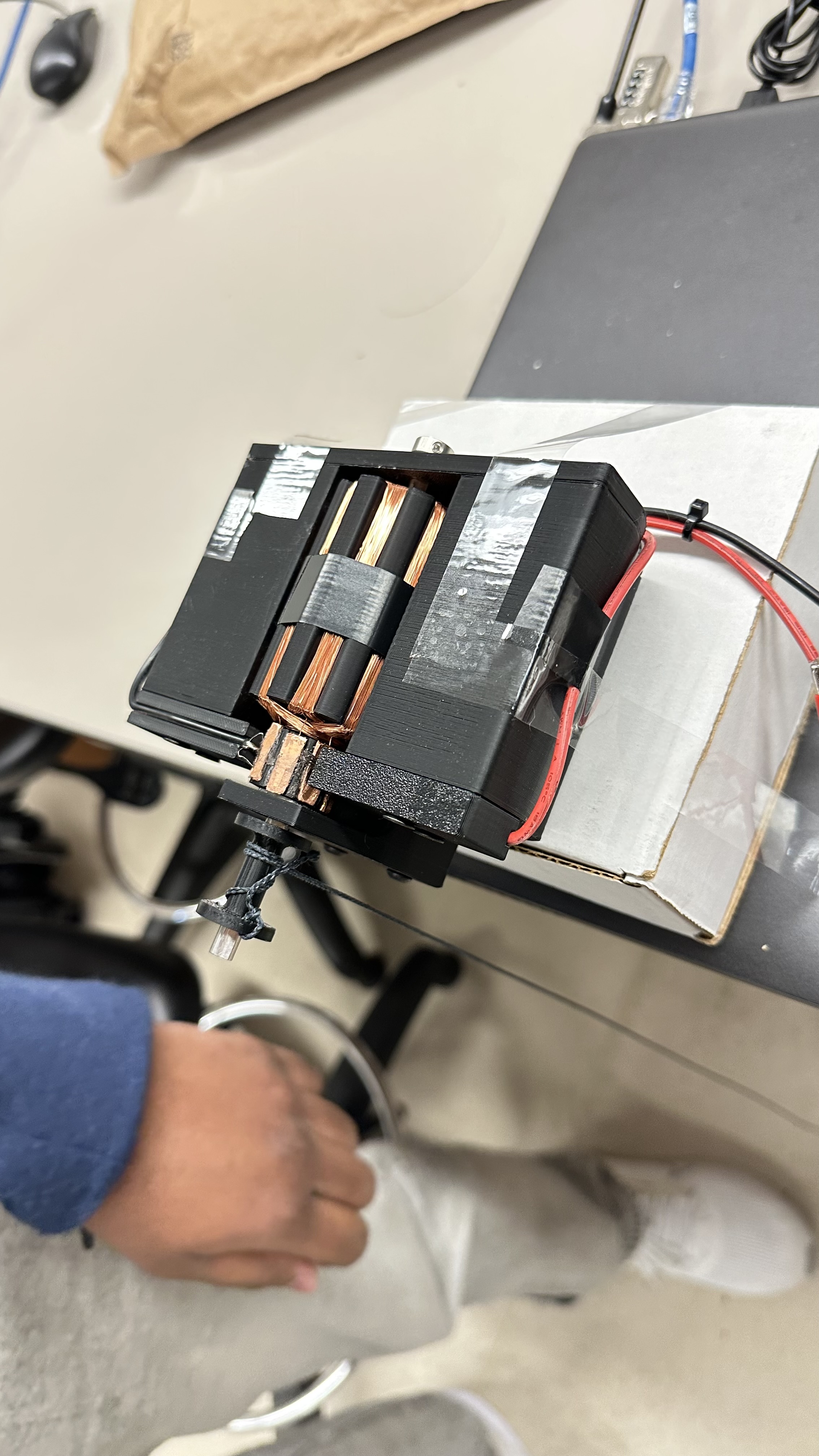
DIY Motor
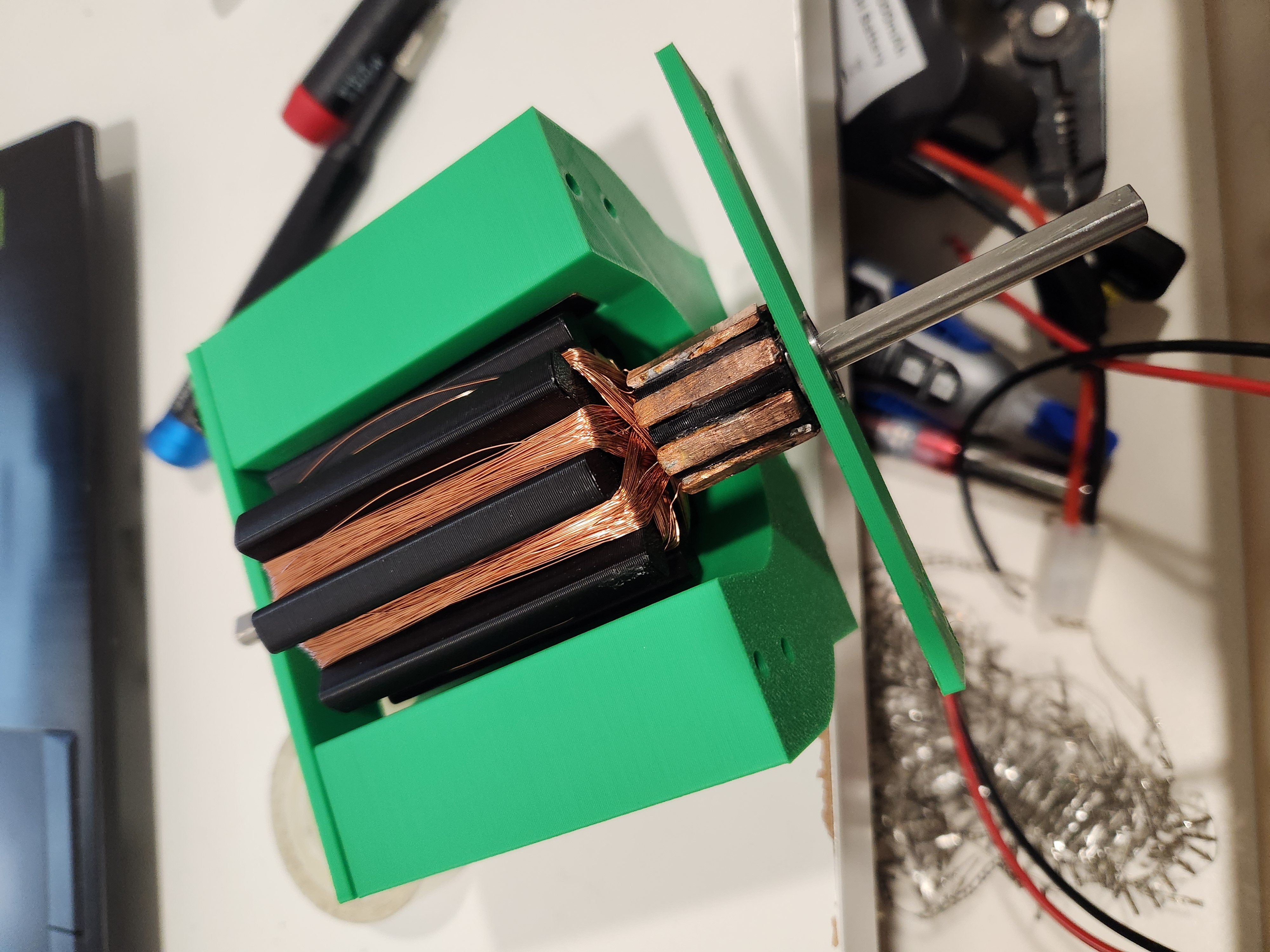
Physics 7B | Novemeber - December 2024
Constructed a custom electric motor for a Physics 7B design project, involving 3D-printed mechanical components, manual fabrication, and soldered electrical connections. The motor was designed and tested to lift a 100-gram load one meter, emphasizing practical application of electromagnetics, iterative refinement, and hardware reliability.
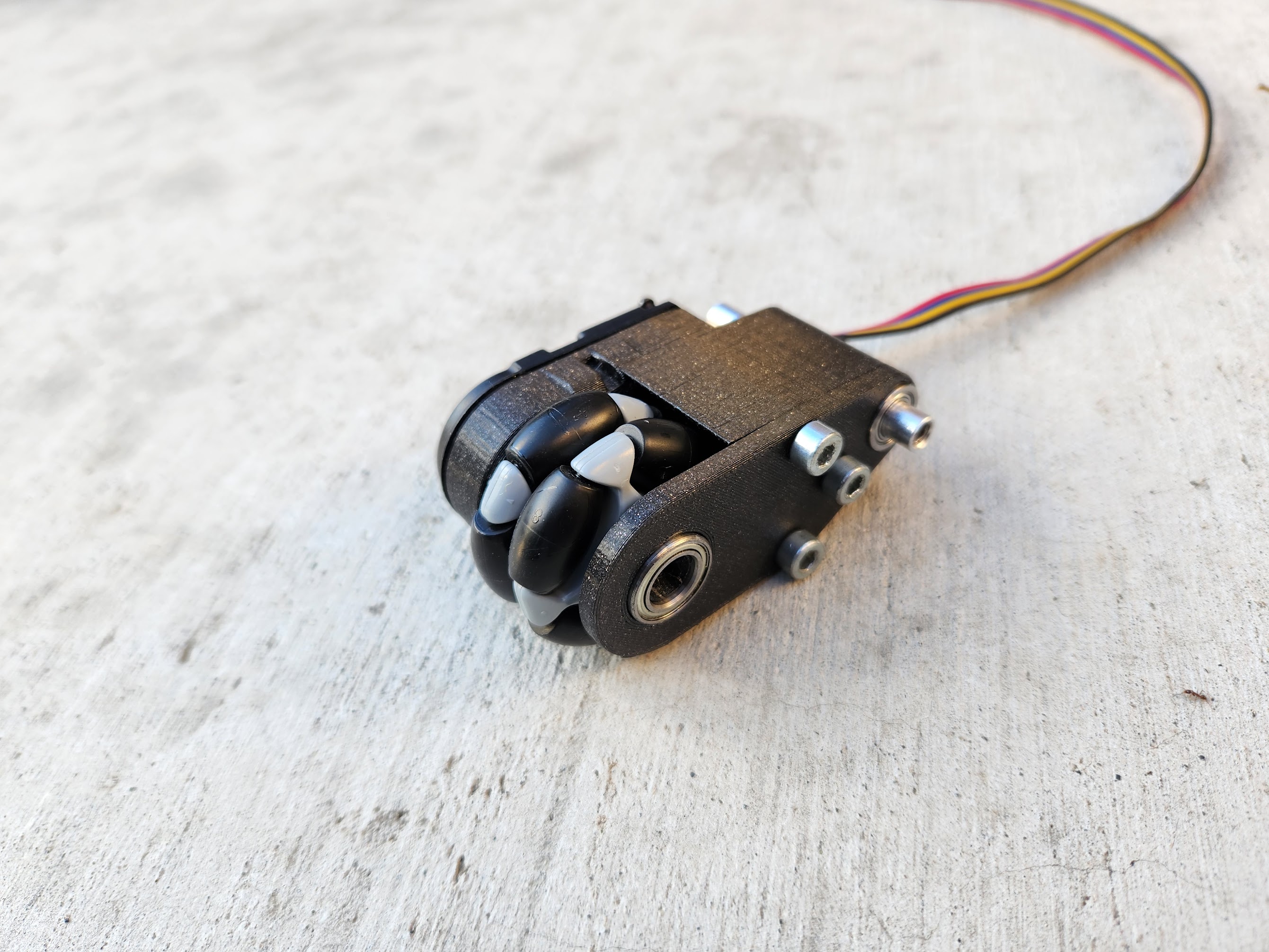
PowerPlay FTC Robot
FIRST Tech Challenge | September 2022 - July 2023
During the 2022–2023 FIRST Tech Challenge season, I worked on the design and construction of the Terrabats competition robot, focusing on mechanical fabrication, electrical integration, and software development. The robot incorporated custom-designed mechanisms modeled in CAD and fabricated through machining and 3D printing, along with integrated motors, sensors, and control electronics. I performed wiring and electrical assembly, including proper crimping, connector selection, and cable management to ensure reliable power and signal distribution. On the software side, I contributed to programming and tuning robot behaviors, followed by systematic testing and iteration to improve consistency and performance under competition conditions. The project emphasized end-to-end system integration, hands-on fabrication, and rigorous testing to achieve a reliable, competition-ready robot.